Comprensión de los sensores MWD: Medición de la inclinación, el acimut y la superficie de la herramienta para la perforación direccional de precisión
Los sistemas de medición durante la perforación (MWD) dependen de sensores de fondo de pozo de alta precisión para proporcionar datos direccionales en tiempo real. Entre todos los parámetros, inclinación, acimut y cara de la herramienta son las tres mediciones del núcleo que determinan la posición espacial y la orientación del conjunto del fondo del pozo (BHA), lo que afecta directamente al control de la trayectoria, la eficacia de la perforación y la precisión de la colocación del pozo.
Medición de la inclinación
La inclinación es el ángulo entre el pozo y la dirección vertical.
Principio de medición
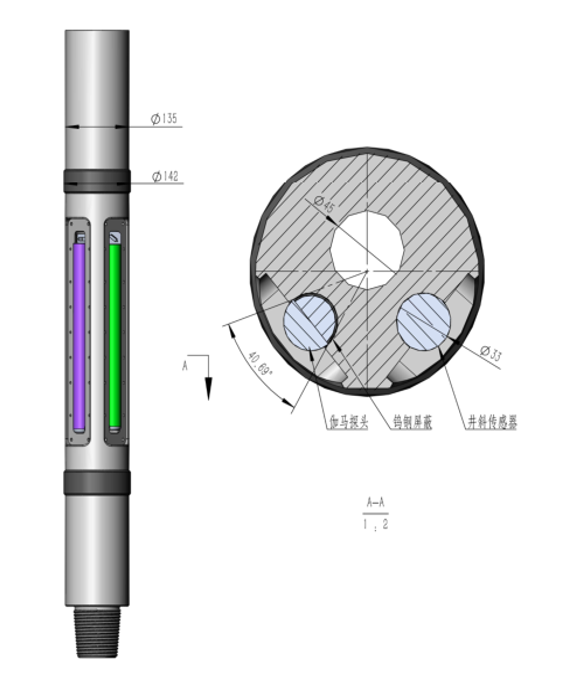
- Utiliza acelerómetros triaxiales
- Detecta el vector de gravedad a lo largo de tres ejes
- Calcula la desviación de la vertical
Valor técnico
- Controla la velocidad de acumulación y la forma de la trayectoria
- Garantiza un perfil preciso del pozo
- Evita desviaciones involuntarias
Las herramientas modernas de MWD utilizan acelerómetros con compensación térmica para mantener lecturas estables en entornos de fondo de pozo de alta temperatura.
Medición del acimut
El acimut define la dirección del pozo con respecto al norte geográfico o magnético.
Principio de medición
- Utiliza magnetómetros triaxiales
- Detecta los componentes del campo magnético terrestre
- Se combina con la inclinación para determinar la dirección espacial
Retos de ingeniería
- Interferencia magnética de la sarta de perforación
- Menor precisión en las regiones de latitud elevada
- Requiere calibración continua
Se aplican herramientas MWD avanzadas algoritmos de compensación magnética dinámica para mejorar la fiabilidad de las mediciones en formaciones complejas.
Medición de la cara de la herramienta
La cara de la herramienta representa la orientación rotacional de la herramienta de dirección o de la carcasa doblada, esencial para el control direccional.
Tipos
- Gravity Toolface (GTF) - utilizado en pozos de baja inclinación
- Cara de herramienta magnética (MTF) - se utiliza en pozos de mayor inclinación
Función de ingeniero
- Controla la dirección de perforación del carro
- Permite una dirección precisa
- Mejora la eficacia de la corrección de la trayectoria
La medición precisa de la cara de la herramienta afecta directamente a colocación del pozo y rendimiento de la perforación.
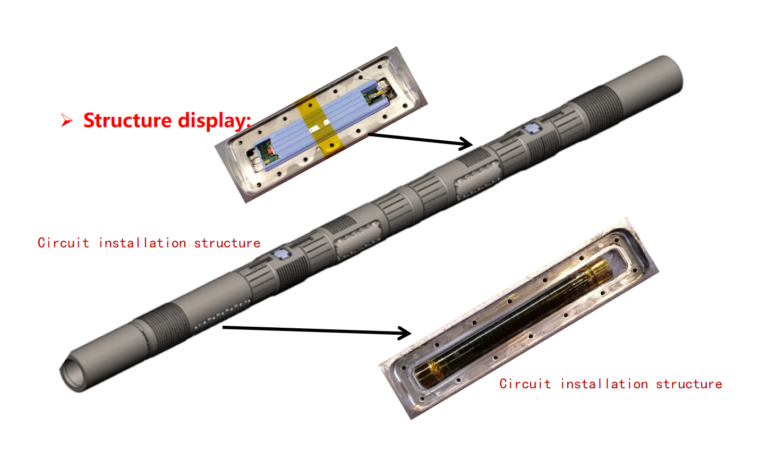
Integración y fiabilidad de los sensores
Los sistemas MWD modernos integran:
- Acelerómetros de alta temperatura
- Magnetómetros de precisión
- Algoritmos de calibración en tiempo real
- Estructura resistente a golpes y vibraciones
Esto permite:
- Control continuo de la trayectoria
- Optimización de la perforación en tiempo real
- Reducción del tiempo no productivo (TNP)
- Mejora de la seguridad y la eficacia de las perforaciones
Valor de la aplicación de campo
La detección direccional de alta precisión permite a los operadores:
- Trayectorias complejas de perforación
- Mejorar la selección de yacimientos
- Reducir los recorridos de corrección
- Aumentar la eficacia de la perforación
Los sensores MWD forman el la detección de testigos, base de la moderna tecnología de perforación dirigida.